Pre-processing#
The following classes for pre-processing MRI data are available:
Cropper#
The Cropper class is used to crop MRI data. Cropping can be performed either in image space or k-space.
Note
If you crop in k-space, data need to be complex-valued as well as that you change the Field-of-View (FOV) of the data. If you crop in image space, the FOV remains the same.
Cropping is configurable via YAML with Hydra. For example:
train_ds:
crop_size: [320, 320]
kspace_crop: false
crop_before_masking: true
validation_ds:
crop_size: [320, 320]
kspace_crop: true
crop_before_masking: true
test_ds:
crop_size: [320, 320]
kspace_crop: false
crop_before_masking: false
The crop_size parameter is the size of the crop. The kspace_crop parameter determines whether the crop is
performed in k-space or image space. The crop_before_masking parameter determines whether the crop is performed
before or after the mask is applied. If the crop is performed before the mask is applied, the mask is applied to the
cropped data. If the crop is performed after the mask is applied, the mask is applied to the uncropped data and then
the crop is performed.
Note
If you crop after the data is masked, the relative acceleration factor of the data will effectively change.
Here is an example on the CC359 dataset. The fully-sampled data
(first image) are cropped in k-space (second image) and in image space (third image). Images are presented as the
coil-combined Root-Sum-of-Squares (rss()).

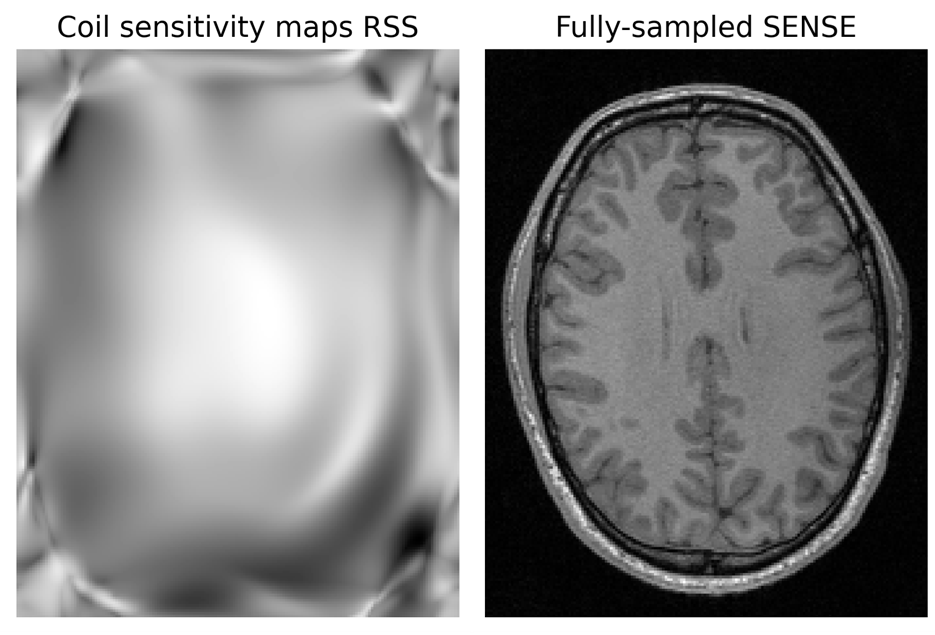
EstimateCoilSensitivityMaps#
The EstimateCoilSensitivityMaps class is used to estimate coil sensitivity maps from multi-coil MRI data. This is
useful when no coil sensitivity maps are available. This class estimates the coil sensitivity maps as implemented in
the DIRECT library. Three methods are available for estimating coil sensitivity
maps: unit, RSS-estimate, and ESPIRIT. The unit method assumes that the data is single-coil. The RSS-estimate method
estimates the coil sensitivity maps by using the root-sum-of-squares of the autocalibration-signal. The ESPIRIT method
estimates the coil sensitivity maps with the ESPIRIT method [Uecker2014].
References#
- Uecker2014
Uecker M, Lai P, Murphy MJ, Virtue P, Elad M, Pauly JM, Vasanawala SS, Lustig M. ESPIRiT–an eigenvalue approach to autocalibrating parallel MRI: where SENSE meets GRAPPA. Magn Reson Med. 2014 Mar;71(3):990-1001. doi: 10.1002/mrm.24751. PMID: 23649942; PMCID: PMC4142121.
Estimating coil sensitivity maps is configurable via YAML with Hydra. For example:
train_ds:
estimate_coil_sensitivity_maps: true
coil_sensitivity_maps_type: rss
coil_sensitivity_maps_gaussian_sigma: 0.0
coil_sensitivity_maps_espirit_threshold: 0.05
coil_sensitivity_maps_espirit_kernel_size: 6
coil_sensitivity_maps_espirit_crop: 0.95
coil_sensitivity_maps_espirit_max_iters: 30
coil_combination_method: SENSE
validation_ds:
estimate_coil_sensitivity_maps: true
coil_sensitivity_maps_type: unit
coil_sensitivity_maps_gaussian_sigma: 0.0
coil_sensitivity_maps_espirit_threshold: 0.05
coil_sensitivity_maps_espirit_kernel_size: 6
coil_sensitivity_maps_espirit_crop: 0.95
coil_sensitivity_maps_espirit_max_iters: 30
coil_combination_method: SENSE
test_ds:
estimate_coil_sensitivity_maps: true
coil_sensitivity_maps_type: espirit
coil_sensitivity_maps_gaussian_sigma: 0.0
coil_sensitivity_maps_espirit_threshold: 0.05
coil_sensitivity_maps_espirit_kernel_size: 6
coil_sensitivity_maps_espirit_crop: 0.95
coil_sensitivity_maps_espirit_max_iters: 30
coil_combination_method: SENSE
Note
This class is different from setting estimate_coil_sensitivity_maps_with_nn to true in the model
section. The EstimateCoilSensitivityMaps class estimates coil sensitivity maps from the data, whereas setting
estimate_coil_sensitivity_maps_with_nn to true in the model section estimates coil sensitivity maps
with a neural network, i.e. a U-Net. Those two methods are not mutually exclusive and can be used together,
meaning that the coil sensitivity maps estimated by the EstimateCoilSensitivityMaps class can be used as input
to the neural network and refined.
Estimating/refining coil sensitivity maps with a neural network is configurable via YAML with Hydra. For example:
estimate_coil_sensitivity_maps_with_nn: true
coil_sensitivity_maps_nn_chans: 8
coil_sensitivity_maps_nn_pools: 4
coil_sensitivity_maps_nn_normalize: true
coil_sensitivity_maps_nn_mask_type: 2D
coil_sensitivity_maps_nn_mask_center: true
The coil_sensitivity_maps_nn_chans parameter is the number of channels in the neural network. The
coil_sensitivity_maps_nn_pools parameter is the number of pooling layers in the neural network. The
coil_sensitivity_maps_nn_normalize parameter determines whether the data is normalized before being fed into
the neural network. The coil_sensitivity_maps_nn_mask_type parameter determines the type of mask that is used
to mask the data before being fed into the neural network, i.e. 1D or 2D. The
coil_sensitivity_maps_nn_mask_center parameter determines whether the center of the mask is used or not. If
coil_sensitivity_maps_nn_mask_center is set to true, the center of the mask is used. If
coil_sensitivity_maps_nn_mask_center is set to false, the center of the mask is not used. The latter might
be useful if the center of the mask is corrupted by noise, but it might also lead to worse estimation of the coil
sensitivity maps.
Here is an example on the CC359 dataset. The estimated coils
sensitivity maps (first image) are presented as the coil-combined Root-Sum-of-Squares
(rss()). The fully-sampled data are coil-combined with the estimated
coil sensitivity maps with the sense() method (second image), as
presented in [Pruessmann1999].
References#
- Pruessmann1999
Pruessmann KP, Weiger M, Scheidegger MB, Boesiger P. SENSE: Sensitivity encoding for fast MRI. Magn Reson Med 1999; 42:952-962.
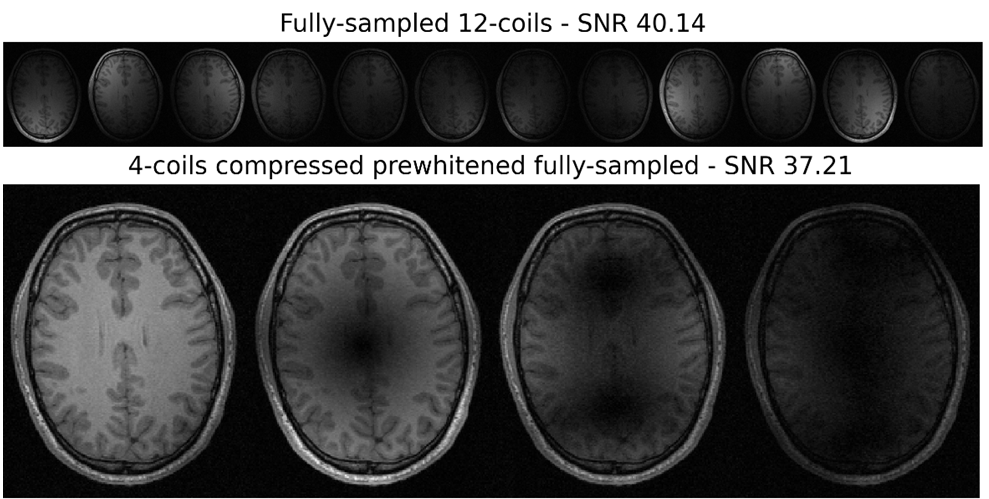
GeometricDecompositionCoilCompression#
The GeometricDecompositionCoilCompression class is used to perform coil compression with the geometric
decomposition method, as presented in [Zhang2013].
References#
- Zhang2013
Zhang, T., Pauly, J. M., Vasanawala, S. S., & Lustig, M. (2013). Coil compression for accelerated imaging with Cartesian sampling. Magnetic Resonance in Medicine, 69(2), 571–582. https://doi.org/10.1002/mrm.24267
The GeometricDecompositionCoilCompression class is configurable via YAML with Hydra. For example:
train_ds:
apply_gcc: true
gcc_virtual_coils: 10
gcc_calib_lines: 24
gcc_align_data: True
validation_ds:
apply_gcc: true
gcc_virtual_coils: 2
gcc_calib_lines: 12
gcc_align_data: False
test_ds:
apply_gcc: false
The apply_gcc parameter determines whether coil compression is applied or not. The gcc_virtual_coils parameter
is the number of virtual coils to compress to. Of course, the number of virtual coils should be smaller than the
number of coils in the data. The gcc_calib_lines parameter is the number of calibration lines used for coil
compression. The gcc_align_data parameter determines whether the data is aligned before coil compression or not.
Here is an example on the CC359 dataset. The fully-sampled 12-coils (first image) are compressed to 4-coils. The SNR in the compressed data is approximately 12% lower than in the fully-sampled data, but the overall image quality is still good.

MotionSimulation#
The MotionSimulation class is used to simulate motion in MRI data, by simulating random translations and rotations
in the frequency domain.
The MotionSimulation class is configurable via YAML with Hydra. For example:
train_ds:
apply_random_motion: true
random_motion_type:"gaussian"
random_motion_percentage: [10, 30]
random_motion_angle: 10
random_motion_translation: 10
random_motion_center_percentage: 0.02
random_motion_num_segments: 8
random_motion_random_num_segments: true
random_motion_non_uniform: false
validation_ds:
apply_random_motion: true
random_motion_type:"piecewise_transient"
random_motion_percentage: [10, 20]
random_motion_angle: 10
random_motion_translation: 10
random_motion_center_percentage: 0.02
random_motion_num_segments: 8
random_motion_random_num_segments: false
random_motion_non_uniform: true
test_ds:
apply_random_motion: true
random_motion_type:"piecewise_constant"
random_motion_percentage: [0, 0]
random_motion_angle: 10
random_motion_translation: 10
random_motion_center_percentage: 0.02
random_motion_num_segments: 8
random_motion_random_num_segments: true
random_motion_non_uniform: false
The apply_random_motion parameter determines whether random motion is applied or not. The random_motion_type
parameter determines the type of random motion that is applied, it can be gaussian, piecewise_constant, or
piecewise_transient. The random_motion_percentage parameter is the percentage of the data that is affected by
random motion. Setting random_motion_percentage to [0, 0] means that no random motion is applied. The
random_motion_angle parameter is the maximum angle of rotation in degrees. The random_motion_translation
parameter is the maximum translation in pixels. The random_motion_center_percentage parameter is the percentage of
the center of the data to center the motion parameters. The random_motion_num_segments parameter is the number of
segments to divide the data into. The random_motion_random_num_segments parameter determines whether the number of
segments is random or not. The random_motion_non_uniform parameter determines whether the motion parameters are
non-uniform or not.
Note
Please check the Motion Simulation page for more information.
Here is an example on the CC359 dataset. The motion corrupted
image is presented as the coil-combined Root-Sum-of-Squares (rss()).

N2R#
The N2R class resembles the Noise-to-Recon method for unsupervised learning of MRI reconstruction [Desai2022].
References#
- [Desai2022] AD Desai, BM Ozturkler, CM Sandino, et al. Noise2Recon: Enabling Joint MRI Reconstruction and
Denoising with Semi-Supervised and Self-Supervised Learning. ArXiv 2022. https://arxiv.org/abs/2110.00075
The N2R class is configurable via YAML with Hydra. For example:
train_ds:
n2r: true
n2r_supervised_rate: 0.05
n2r_probability: 0.0
n2r_std_devs: None
n2r_rhos: None
n2r_use_mask: False
validation_ds:
n2r: true
n2r_supervised_rate: 0.0
n2r_probability: 0.0
n2r_std_devs: None
n2r_rhos: None
n2r_use_mask: False
test_ds:
n2r: false
The n2r parameter determines whether the Noise2Recon method is applied or not. The n2r_supervised_rate
parameter is the rate of supervised samples in the training data. It can be set to 0.0 for fully unsupervised
learning or to a small percentage for semi-supervised learning. The n2r_probability parameter is the probability
of applying the Noise2Recon method to a sample. The n2r_std_devs parameter is the standard deviation of the
Gaussian noise that is added to the data. The n2r_rhos parameter is the correlation coefficient of the Gaussian
noise that is added to the data. The n2r_use_mask parameter determines whether the mask is applied to the data
before the Noise2Recon method is applied or not. If n2r_use_mask is set to True, the mask is applied to the
data before the Noise2Recon method is applied. If n2r_use_mask is set to False, the mask is not applied to the
data before the Noise2Recon method is applied.
The N2R class can be used in combination with the unsupervised_masked_target argument of the dataloaders.
If unsupervised_masked_target is set to True, the target is masked before the Noise2Recon method is applied.
If unsupervised_masked_target is set to False, the target is not masked before the Noise2Recon method is
applied.
Here is an example on the CC359 dataset. The N2R image is
presented as the coil-combined Root-Sum-of-Squares (rss()).

NoisePreWhitening#
The NoisePreWhitening class is used to perform noise pre-whitening/coil-decorrelation. This is useful when the
noise is uncorrelated, i.e. non iid.
The NoisePreWhitening class is configurable via YAML with Hydra. For example:
train_ds:
apply_prewhitening: true
find_patch_size: true
prewhitening_scale_factor: 1.0
validation_ds:
apply_prewhitening: true
find_patch_size: false
prewhitening_scale_factor: 0.8
prewhitening_patch_start: 10
prewhitening_patch_length: 30
test_ds:
apply_prewhitening: false
The apply_prewhitening parameter determines whether noise pre-whitening is applied or not. The find_patch_size
parameter determines whether the patch size is found automatically or not. If find_patch_size is set to False,
the patch size is set manually with the prewhitening_patch_start and prewhitening_patch_length parameters, as
[prewhitening_patch_start, prewhitening_patch_start + prewhitening_patch_length, prewhitening_patch_start,
prewhitening_patch_start + prewhitening_patch_length]. The scale_factor parameter is used to adjust for
effective noise bandwidth and difference in sampling rate between noise calibration and actual measurement. It is
given by \(scale\_factor = \frac{T\_acq\_dwell}{T\_noise\_dwell} \cdot NoiseReceiverBandwidthRatio\) .
Here is an example on the CC359 dataset. The fully-sampled 12-coils (first image) are noise pre-whitened (second image). The SNR in the pre-whitened data is approximately 18% higher than in the fully-sampled data.

Normalizer#
The Normalizer class is used to normalize MRI data. The following normalization methods are available:
minmax: Data are normalized as \(\frac{data - \min(data)}{\max(data) - \min(data)}\) to [0, 1].max: data are normalized as \(\frac{data}{\max(data)}\) to [0, 1].mean_std: data are normalized as \(\frac{data - mean(data)}{std(data)}\).mean_var: data are normalized as \(\frac{data - mean(data)}{var(data)}\).grayscale: data are normalized as \(\frac{data - \min(data)}{\max(data) - \min(data)} \cdot 255\) to [0, 255].fft: only the defaultfft_normalizationwill be applied, i.e.backward. It is basically the same asnone.none.
The Normalizer class is configurable via YAML with Hydra. For example:
train_ds:
normalize_inputs: true
normalization_type: minmax
kspace_normalization: false
validation_ds:
normalize_inputs: true
normalization_type: minmax
kspace_normalization: true
test_ds:
normalize_inputs: false
The normalize_inputs parameter determines whether the inputs are normalized or not. The normalization_type
parameter determines the normalization method. The kspace_normalization parameter determines whether the
normalization is performed in k-space or image space.
The following arguments in the model section of the YAML config file are also related to normalization:
normalization_type: determines the normalization type as above.unnormalize_loss_inputs: if data are normalized, you can choose to unnormalize them before calculating the loss.unnormalize_log_outputs: if data are normalized, you can choose to unnormalize them before logging metrics.
SNREstimator#
The SNREstimator class is used to estimate the SNR of MRI data. The SNR is using the
skimage.filters.threshold_otsu and the skimage.morphology.convex_hull_image functions to estimate
the signal. The noise is estimated in k-space by defining as patch, as in NoisePreWhitening. The SNR is then
calculated as the ratio of the signal and the noise.
The SNREstimator class is configurable via YAML with Hydra. For example:
patch_size: [10, 30, 10, 30]
apply_ifft: true
fft_centered: false
fft_normalization: "backward"
spatial_dims: [-2, -1]
coil_dim: -3
multicoil: true
The patch_size parameter is the size of the patch that is used to estimate the noise. The apply_ifft parameter
determines whether the inverse Fourier transform is applied to the data before estimating the noise or not. The
fft_centered parameter determines whether the Fourier transform is centered or not. The fft_normalization
parameter determines the normalization of the Fourier transform. The spatial_dims parameter determines the spatial
dimensions of the data. The coil_dim parameter determines the coil dimension of the data. The multicoil
parameter determines whether the data is multi-coil or not.
Note
The SNREstimator class is currently not a transform you can compose. You can call it in external scripts to
estimate the SNR of your data, or configure it in your own transform.
SSDU#
The SSDU class resembles the Self-Supervised Data Undersampling method for unsupervised learning of MRI
reconstruction [Yaman2020].
References#
- [Yaman2020] Yaman, B, Hosseini, SAH, Moeller, S, Ellermann, J, Uğurbil, K, Akçakaya, M. Self-supervised learning
of physics-guided reconstruction neural networks without fully sampled reference data. Magn Reson Med. 2020; 84: 3172–3191. https://doi.org/10.1002/mrm.28378
The SSDU class is configurable via YAML with Hydra. For example:
train_ds:
ssdu: true
ssdu_mask_type: "Gaussian"
ssdu_rho: 0.4
ssdu_acs_block_size: [4, 4]
ssdu_gaussian_std_scaling_factor: 4.0
ssdu_outer_kspace_fraction: 0.0
ssdu_export_and_reuse_masks: false
validation_ds:
ssdu: true
ssdu_mask_type: "Uniform"
ssdu_rho: 0.4
ssdu_acs_block_size: [4, 4]
ssdu_gaussian_std_scaling_factor: 4.0
ssdu_outer_kspace_fraction: 0.0
ssdu_export_and_reuse_masks: true
test_ds:
ssdu: false
The ssdu parameter determines whether the Self-Supervised Data Undersampling method is applied or not. The
ssdu_mask_type parameter determines the type of mask that is used to undersample the data. The ssdu_rho
parameter is the split ratio for training and loss masks. The ssdu_acs_block_size parameter keeps a small acs
region fully-sampled for training masks, if there is no fully-sampled acs region. The ssdu_acs_block_size should
be set to zero. The ssdu_gaussian_std_scaling_factor parameter is the scaling factor for the standard deviation
of the Gaussian mask. The ssdu_outer_kspace_fraction parameter is the fraction of outer k-space lines that are
masked. The ssdu_export_and_reuse_masks parameter determines whether the masks are exported and reused or not. If
ssdu_export_and_reuse_masks is set to True, the masks are exported to the tmp directory and reused in the
next call. This option is useful when the data are too large to be stored in memory.
Note
SSDU can be used with N2R as described in the Noise-to-Recon paper [Desai2022].
Here is an example on the CC359 dataset. SSDU returns two masks,
one to be used as mask for training (first image) and one to be used as mask against which the loss is calculated
(second image). The presented SSDU images are the inputs where the mask is applied, computed as the coil-combined
Root-Sum-of-Squares (rss()).

ZeroFillingPadding#
The ZeroFillingPadding class is used to pad MRI data in k-space, i.e. enlarge the Field-of-View (FOV) of the data.
This is useful when the data are undersampled and the FOV needs to be enlarged to match the FOV of the fully-sampled
data.
The ZeroFillingPadding class is configurable via YAML with Hydra. For example:
train_ds:
kspace_zero_filling_size: [640, 640]
validation_ds:
kspace_zero_filling_size: [640, 640]
test_ds:
kspace_zero_filling_size: None
The kspace_zero_filling_size parameter is the size of the zero-filled k-space. If kspace_zero_filling_size is
set to None, no zero-filling is performed.
Here is an example on the CC359 dataset. The zero-filled padded
image is presented as the coil-combined Root-Sum-of-Squares (rss()).

Composer#
The Composer class is used to compose a series of transforms into a single transform. No configuration is required
for this class.
Here is an example on the CC359 dataset. The fully-sampled 12-coils (first image) are compressed to 4-coils and noise pre-whitened (second image), as a composed transform. The SNR in the pre-whitened data is approximately 8% lower than in the fully-sampled data, showing the apparent improvement of noise pre-whitening compared to the 12% loss in the standalone Geometric Decomposition Coil Compression method.
MRIDataTransforms#
The MRIDataTransforms class is used to compose the transforms that are applied to the MRI data. All the
aforementioned transforms are composed in this class. The MRIDataTransforms class is configurable via YAML with
Hydra. A few other parameters are also important and should be set in the train_ds, validation_ds, and
test_ds sections of the YAML config file. For example:
# dataset-related parameters
dataset_format: None
dimensionality: 2
consecutive_slices: 1
# fft-related parameters
fft_centered: false
fft_normalization: "backward"
spatial_dims: [-2, -1]
coil_dim: 1
# undersampling-related parameters
mask_func: None
shift_mask: false
mask_center_scale: 0.02
partial_fourier_percentage: 0.0
remask: false
# dataloader-related parameters
use_seed: false
The dataset_format parameter is the format of the dataset. The dimensionality parameter is the dimensionality
of the data, i.e. 2 for 2D data and 3 for 3D data. The consecutive_slices parameter is the number of
consecutive slices that are used as input. If set to 1, only one slice is used as input. If set to 2 or more,
the number of slices is increased by one for each additional consecutive slice. The coil_dim parameter determines
the coil dimension of the data.
Note
Please check the multitasking, qMRI, reconstruction, and segmentation projects pages for information about the supported public datasets.
The fft_centered parameter determines whether the Fourier transform is centered or
not. The fft_normalization parameter determines the normalization of the Fourier transform. The spatial_dims
parameter determines the spatial dimensions of the data.
Note
Please check the FFT page for more information.
The mask_func parameter is the mask function that is used to undersample the data. The shift_mask
parameter determines whether the mask is shifted or not. The mask_center_scale parameter is the scale of the mask
center. The partial_fourier_percentage parameter is the percentage of the data that is undersampled. The
remask parameter determines whether the data is remasked or not. The use_seed parameter determines whether a
seed is used or not.
qMRIDataTransforms#
Inheriting from the MRIDataTransforms class, the qMRIDataTransforms class is used to compose the transforms
that are applied to the MRI data for the quantitative task. A few other parameters are also important and should be
set in the train_ds, validation_ds, and test_ds sections of the YAML config file. For example:
# dataset-related parameters
TEs: None
precompute_quantitative_maps: true
qmaps_scaling_factor: 1.0
shift_B0_input: false
The TEs parameter is the echo times of the data. The precompute_quantitative_maps parameter determines whether
the quantitative maps are precomputed or not. If not precomputed, the quantitative maps are computed on the fly. The
qmaps_scaling_factor parameter is the scaling factor of the quantitative maps. The shift_B0_input parameter
determines whether the B0 map is shifted or not.
RSMRIDataTransforms#
Inheriting from the MRIDataTransforms class, the RSMRIDataTransforms class is used to compose the transforms
that are applied to the MRI data for the reconstruction and segmentation tasks.
ReconstructionMRIDataTransforms#
Inheriting from the MRIDataTransforms class, the ReconstructionMRIDataTransforms class is used to compose the
transforms that are applied to the MRI data for the reconstruction task.
SegmentationMRIDataTransforms#
Inheriting from the MRIDataTransforms class, the SegmentationMRIDataTransforms class is used to compose the
transforms that are applied to the MRI data for the segmentation task.
Full Example#
Here is a full training example of a YAML config file for the reconstruction task on the CC359 dataset:
train_ds:
# dataset-related parameters
data_path: /calgary-campinas_version-1.0/CC359/Raw-data/Multi-channel/12-channel/Train
coil_sensitivity_maps_path: None
mask_path: /calgary-campinas_version-1.0/CC359/poisson_sampling_h5/Train
noise_path: None
initial_predictions_path: None
dataset_format: cc359
dimensionality: 2
consecutive_slices: 1
complex_target: true
# sample rate parameters
sample_rate: 1
volume_sample_rate: None
use_dataset_cache: false
dataset_cache_file: None
num_cols: None
# dataloader-related parameters
data_saved_per_slice: false
use_seed: false
batch_size: 1
shuffle: true
num_workers: 8
pin_memory: false
drop_last: false
# * Transforms *
# fft-related parameters
fft_centered: false
fft_normalization: "backward"
spatial_dims: [-2, -1]
coil_dim: 1
# coil compression parameters
apply_gcc: true
gcc_virtual_coils: 10
gcc_calib_lines: 24
gcc_align_data: True
# coil sensitivity maps parameters
estimate_coil_sensitivity_maps: true
coil_sensitivity_maps_type: rss
coil_sensitivity_maps_gaussian_sigma: 0.0
coil_sensitivity_maps_espirit_threshold: 0.05
coil_sensitivity_maps_espirit_kernel_size: 6
coil_sensitivity_maps_espirit_crop: 0.95
coil_sensitivity_maps_espirit_max_iters: 30
coil_combination_method: SENSE
# cropping parameters
crop_size: [200, 200]
kspace_crop: false
crop_before_masking: true
# motion simulation parameters
apply_random_motion: true
random_motion_type:"gaussian"
random_motion_percentage: [10, 30]
random_motion_angle: 10
random_motion_translation: 10
random_motion_center_percentage: 0.02
random_motion_num_segments: 8
random_motion_random_num_segments: true
random_motion_non_uniform: false
# noise-2-recon parameters
n2r: true
n2r_supervised_rate: 0.05
n2r_probability: 0.0
n2r_std_devs: None
n2r_rhos: None
n2r_use_mask: False
# noise pre-whitening parameters
apply_prewhitening: true
find_patch_size: true
prewhitening_scale_factor: 1.0
# normalization parameters
normalize_inputs: true
normalization_type: minmax
kspace_normalization: false
# self-supervised data undersampling parameters
ssdu: true
ssdu_mask_type: "Gaussian"
ssdu_rho: 0.4
ssdu_acs_block_size: [4, 4]
ssdu_gaussian_std_scaling_factor: 4.0
ssdu_outer_kspace_fraction: 0.0
ssdu_export_and_reuse_masks: false
# zero-filling padding parameters
kspace_zero_filling_size: [320, 320]
# undersampling-related parameters
mask_func: None
shift_mask: false
mask_center_scale: 0.02
partial_fourier_percentage: 0.0
remask: false
validation_ds:
# dataset-related parameters
data_path: /calgary-campinas_version-1.0/CC359/Raw-data/Multi-channel/12-channel/Val
coil_sensitivity_maps_path: None
mask_path: /calgary-campinas_version-1.0/CC359/poisson_sampling_h5/Val
noise_path: None
initial_predictions_path: None
dataset_format: cc359
dimensionality: 2
consecutive_slices: 1
complex_target: true
# sample rate parameters
sample_rate: 1
volume_sample_rate: None
use_dataset_cache: false
dataset_cache_file: None
num_cols: None
# dataloader-related parameters
data_saved_per_slice: false
use_seed: true
batch_size: 1
shuffle: true
num_workers: 8
pin_memory: false
drop_last: false
# * Transforms *
# fft-related parameters
fft_centered: false
fft_normalization: "backward"
spatial_dims: [-2, -1]
coil_dim: 1
# coil compression parameters
apply_gcc: true
gcc_virtual_coils: 10
gcc_calib_lines: 24
gcc_align_data: True
# coil sensitivity maps parameters
estimate_coil_sensitivity_maps: true
coil_sensitivity_maps_type: rss
coil_sensitivity_maps_gaussian_sigma: 0.0
coil_sensitivity_maps_espirit_threshold: 0.05
coil_sensitivity_maps_espirit_kernel_size: 6
coil_sensitivity_maps_espirit_crop: 0.95
coil_sensitivity_maps_espirit_max_iters: 30
coil_combination_method: SENSE
# cropping parameters
crop_size: [200, 200]
kspace_crop: false
crop_before_masking: true
# motion simulation parameters
apply_random_motion: true
random_motion_type:"gaussian"
random_motion_percentage: [10, 30]
random_motion_angle: 10
random_motion_translation: 10
random_motion_center_percentage: 0.02
random_motion_num_segments: 8
random_motion_random_num_segments: true
random_motion_non_uniform: false
# noise-2-recon parameters
n2r: true
n2r_supervised_rate: 0.05
n2r_probability: 0.0
n2r_std_devs: None
n2r_rhos: None
n2r_use_mask: False
# noise pre-whitening parameters
apply_prewhitening: true
find_patch_size: true
prewhitening_scale_factor: 1.0
# normalization parameters
normalize_inputs: true
normalization_type: minmax
kspace_normalization: false
# self-supervised data undersampling parameters
ssdu: true
ssdu_mask_type: "Gaussian"
ssdu_rho: 0.4
ssdu_acs_block_size: [4, 4]
ssdu_gaussian_std_scaling_factor: 4.0
ssdu_outer_kspace_fraction: 0.0
ssdu_export_and_reuse_masks: false
# zero-filling padding parameters
kspace_zero_filling_size: [320, 320]
# undersampling-related parameters
mask_func: None
shift_mask: false
mask_center_scale: 0.02
partial_fourier_percentage: 0.0
remask: false